
Selvkjørende biler og busser

Selvkjørende biler har potensialet til å bedre effektiviteten, mobiliteten, og trafikksikkerheten i transportsystemet. Det er fortsatt knyttet stor usikkerhet til om de vil bidra positivt eller negativt miljømessig. De fleste tror at selvkjørende biler vil medføre økt kjøring, mens virkningene på kø, energi- og arealbruk er mer usikker. Teknologien som kreves for at selvkjørende kjøretøy kan ferdes fritt på alle offentlige veger er fortsatt ikke moden nok. Testing pågår på offentlige veger, men med testfører som kan gripe inn hvis nødvendig. Det forventes at selvkjørende biler på utvalgte strekninger kan bli en realitet i 2020-2025. Full automatisering ligger derimot langt frem i tid.
Selvkjørende minibuss testet ut i forbindelse med EU prosjektet CityMobil2.
1. Problem og formål
I flere land foregår det nå uttesting av selvkjørende kjøretøy. Disse kjøretøyene kan bedre sikkerheten på vegnettet og gi en bedre utnyttelse av eksisterende vegnett. Selvkjørende biler kan også bedre mobiliteten til grupper som i dag har begrenset mobilitet.
Dette passer bra med hensyn til hovedmålene i NTP (Samferdselsdepartementet 2017) som er:
- Bedre fremkommelighet
- Nullvisjon for drepte og hardt skadde
- Universelt utformet transportsystem
- Begrense miljø- og klimavirkninger
Tabell 1 gir en oversikt over noen forkortelser som brukes innenfor feltet.
Tabell 1: Ordforklaring (engelsk)
|
Forkort. |
Forklaring |
|
ADAS |
Advanced Driver Assistance Systems |
|
ART(S) |
Automated Road Transport (System) |
|
AV |
Automated Vehicle |
|
CAT |
Connected and Automated Transport |
|
CAV |
Connected and Automated Vehicle |
|
GPS |
Global Position System |
|
INS |
Internal Navigation System |
|
ITS |
Intelligent Transportation System |
|
V2I |
Vehicle-to-Infrastructure communication |
|
V2V |
Vehicle-to-Vehicle communication |
|
V2P |
Vehicle-to-Pedestrian communication |
|
V2X |
Vehicle-to-"all" |
Selvkjørende kjøretøy kan føre til mer effektiv kjøring (økokjøring/samkjøring) som er positivt for miljøet, det kan også redusere behovet for parkeringsplasser i bysentra som kan være positivt for arealbruken og gi nye muligheter for byutvikling.
Det finnes allerede biler på markedet som har ulike typer førerstøttesystemer. Eksempler er: adaptiv cruisekontroll, feltholder, parkeringsassistanse og automatisk nødbrems.
Automatisering har kommet langt innenfor flere transportsektorer, i denne beskrivelsen er fokuset selvkjørende kjøretøy på veg.
2. Beskrivelse av tiltaket
Selvkjørerende kjøretøy har foreløpig ingen fastlagt definisjon, og ulike miljøer opererer med ulike definisjoner. Myndighetene i Nevada (2011) har valgt følgende definisjon av selvkjørende kjøretøy: A motor vehicle that uses artificial intelligence, sensors and global positioning system coordinates, to drive itself without the active intervention of a human operator.
I et høringsnotat fra Samferdselsdepartementet (2016) beskrives departementets foreløpige tolkning av begrepene som følger: Selvkjørende kjøretøy er definert som en motorvogn som er utstyrt med et teknisk system som automatisk fører motorvognen og som har kontroll over kjøringen. Dette fastslår den sentrale funksjonen som skiller selvkjørende kjøretøy fra mer tradisjonelle kjøretøy. Definisjonen omfatter ikke kjøretøy med førerstøttesystemer som allerede er i utstrakt bruk, hvor hovedformålet er å assistere føreren. Det vil si at betegnelsen selvkjørende kjøretøy benyttes både om motorvogn der en fører kan overlate kjøringen til et teknisk system som automatisk fører motorvognen, og motorvogn som er konstruert for å kjøre uten fører. Automatiserte kjøretøy er en samlebetegnelse på alle kjøretøy med et visst innslag av automatisering. Autonome kjøretøy brukes ofte om kjøretøy som ikke er avhengig av noe utenfor kjøretøyet selv og dets systemer, altså verken fører eller oppkobling mot internett, infrastruktur eller andre kjøretøy.
Ulike nivåer av automatisering
Kjøretøyenes automatiseringsgrad kan deles inn i fem nivåer (SAE International 2016), se tabell 2. På de to første nivåene (1+2) er det bilens fører (et menneske) som har overoppsyn med bilens omgivelser, mens det på de andre nivåene (3-5) er et automatisert system som utfører denne oppgaven. Flere biler på markedet er allerede nivå 2 biler. Dette gjelder biler med førerstøttesystemer som adaptiv cruise-kontroll, feltholder, nødnedbremsing, parkeringsassistanse mm.
Fokuset i tiltaksbeskrivelsen vil være på selvkjørende kjøretøy med automatiseringsnivå 3-5.
Tabell 2: Fem nivåer av automatisering av kjøreprosessen. Kilde: SAE International 2016, Foss 2017.
|
Nivå |
Navn |
Beskrivelse |
Føreroppgaver |
Reserve løsning, fører opp-gaver |
Virke- |
|
|
Grunnleggende kontroll av kjøretøyet |
Detektering/ respons av objekter/ hendelser |
|||||
|
Nivå 0-2: Fører utfører alle eller enkelte av føreroppgavene |
||||||
|
0 |
Ingen |
Fører utfører alle føreroppgavene, men kan støtte seg til aktive sikkerhetssystemer. |
Fører |
Fører |
Fører |
Ubegrenset |
|
1 |
Fører |
Systemet for automatisert kjøring utfører kontroll av kjøretøyet enten sideveis eller i kjøreretning, i virkeområdet. Føreren utfører andre føreroppgavene; evt med hjelp av aktive sikkerhetssystemer. |
Fører/ |
Fører |
Fører |
Begrenset |
|
2 |
Delvis |
Systemet for automatisert kjøring utfører kontroll av kjøretøyet sideveis og i kjøreretning, i virkeområdet. Føreren utfører andre føreroppgavene, evt med hjelp av aktive sikkerhetssystemer. |
System |
Fører |
Fører |
Begrenset |
|
Nivå 3-5: System for automatisk kjøring utfører alle føreroppgavene (når systemet er på) |
||||||
|
3 |
Betinget |
Systemet for automatisert kjøring utfører alle føreroppgavene, i virkeområdet. En bruker/fører er klar til å ta over fører-oppgavene som en reserveløsning, eller ved forespørsel fra systemet. |
System |
System |
«Fører/ |
Begrenset |
|
4 |
Høy grad av |
Systemet for automatisert kjøring utfører alle føreroppgavene og reserveløsningen, i virkeområdet. |
System |
System |
System |
Begrenset |
|
5 |
Full |
Systemet for automatisert kjøring utfører alle føreroppgavene og reserveløsningen. Uten begrensninger mhp virkeområde. |
System |
System |
System |
Ubegrenset |
For nivå 3 kjøretøy kan alle funksjonene styres automatisk, men det en fører om bord som kan gripe inn ved behov. Ved nivå 5 er det ingen restriksjoner (vegtype/vegmiljø) på hvor det førerløse kjøretøyet kan ferdes, mens det ved nivå 4 er begrensninger på hvor kjøretøyet kan ferdes uten fører (f. eks. innenfor en bygrense, i bestemte korridorer). I enkelte miljøer er nivå 4 og 5 slått sammen til en kategori. Men de fleste har nå gått over til SAE definisjonene.
Selvkjørende kjøretøy
Selvkjørende kjøretøy krever at flere typer teknologier virker sammen:
- Kjøretøyet utstyres med sensorer (se tabell 3) som registrerer nære omgivelser. Sensorene har sine styrker og svakheter. Tesla hadde i 2016 en dødsulykke i Florida, mens bilen kjørte på Autopilot. Bilens sensorer klarte ikke å oppdage en hvit lastebil i det skarpe sollyset (Andersen 2017).
- Sammenkobling (Connectivity). Kjøretøyet må ha tilgang til oppdatert informasjon om trafikk, infrastruktur, vær, vegarbeid, kartdata, køsituasjon mm. Informasjonen brukes til å overvåke omgivelsene.
- Software kontroll algoritmer. Systemet behandler informasjonen som mottas fra kjøretøyets sensorer og øvrig informasjon bilen har tilgang til (via «connectivity» funksjoner), og foretar handlinger basert på all tilgjengelig informasjon. For at algoritmene skal bli gode, er det viktig at det er samlet inn mye informasjon fra kjøring i virkelig trafikk for å redusere faren for feilhandlinger/feiltolkninger.
Det kan lages felles database basert på kjøringen til mange biler, og algoritmene kan stadig forbedres etter hvert som stadig nye trafikksituasjoner er kategorisert og inkludert i databasen. Det lages på grunnlag av dette databaser med regler for hvordan systemet skal handle gitt en bestemt situasjon. Systemene må blant annet klare å skille en syklist fra en motorsyklist, da handlingsmønsteret til disse vil være forskjellig. Volvo fant blant annet ut at deres systemer fint klarte å oppdage elg og hjort (og reagere deretter), men at systemet hadde problemer med å tolke hva en kenguru var for noe (The Guardian 2017). Googlebilene (nå waymo) har kjørt rundt 5 mill. km på offentlige veger i USA (Waymo 2017), og har samlet enorme mengder data som de stadig kan forbedre sine algoritmer med. Alle erfaringsdata trenger ikke å komme fra kjøring i virkelig trafikk, dette kan for eksempel suppleres med datasimuleringer av tenkte situasjoner.
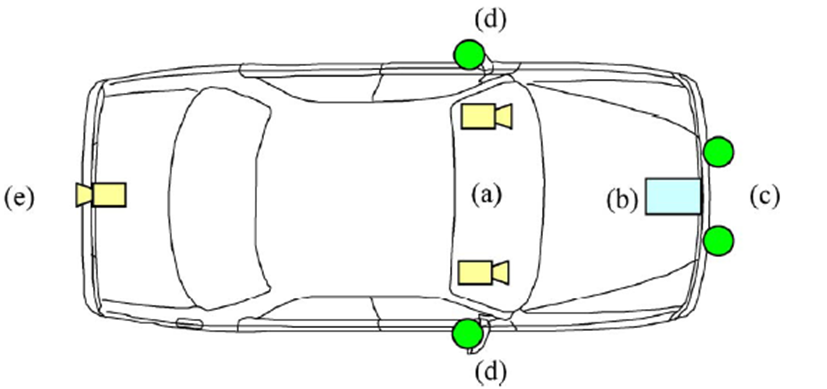
Figur 1: Ulike sensorer for å overvåke bilens omgivelser. a) kamera/sensor som skal oppdage fjerne objekter, b) radar for avstandsmålinger, c) registrering av nære objekter, d) overvåkning av blindsonen, e) ryggekamera. Kilde: Gandhi and Trivedi 2007
De selvkjørende bilene utstyres vanligvis med flere typer sensorer som skal lese omgivelsene rundt bilen, oppdage objekter på kollisjonskurs, og varsle systemet om mulige farer, se f. eks. figur 1. Ulike bilprodusenter har foreløpig valgt litt forskjellige typer og antall sensorer på sine kjøretøy. Dagens versjoner av de ulike sensorene har sine styrker og svakheter, derfor er en kombinasjon av ulike sensorer nødvendig. Tabell 3 gir en beskrivelse av noen typer sensorer som benyttes i selvkjørende kjøretøy.
Tabell 3: Ulike typer sensorer som kan benyttes på selvkjørende kjøretøy. Kilde: Anderson m. fl. 2016.
|
Type sensor |
Beskrivelse |
|
Lidar |
Lidar - Light detection and ranging. Måler tiden det tar før en laserstråle treffer et objekt, og lyset reflekterer tilbake. Dette brukes til å kalkulere avstanden til et objekt. Relativ kort rekkevidde (opp til ca. 120 meter). Reflekterer dårlig på visse typer overflater (som svart asfalt). Dyr, men det arbeides med å lage billigere versjoner. |
|
Radar |
Radar- Radio detection and ranging. Måler tiden det tar før en radiobølge reflekterer tilbake fra et objekt. Basert på dette kalkuleres avstanden til objektet. Virker godt på metaller (kjøretøy), men mindre godt på ikke metaller. Noe som betyr at fotgjengere er mer eller mindre usynlige for en radar. Forskning pågår for å bedre dette. Er foreløpig dyre. |
|
Kamera |
Har begrensninger i mørke/tåke/tett regn/snødekket vegbane/motlys mm. |
|
Ultralyd sensor |
Virker på korte avstander fra 1-10 meter. Brukes blant annet til parkeringsassistanse og som reserve varselsystem. Forholdsvis billig. Kan slås ut av snø som legger seg på sensoren. |
|
Infrarød/ |
Kan i motsetning til vanlige kameraer også se vegoppmerking i mørke. Kan brukes til å oppdage fotgjengere og syklister, også når det er mørkt. Kort rekkevidde. |
Flere av disse sensorene vil være sårbare for vinterforhold og dårlige kjøreforhold. Dette kan skap ekstra utfordringer for selvkjørende biler i Norge.
For å fungere etter hensikten må en selvkjørende bil til enhver tid vite hvor den er. Til dette brukes GPS, som ved hjelp av kontakt med satellitter/mobiltårn kan triangulere bilens posisjon. Ulempen er at GPS ikke gir nøyaktig posisjonering overalt. Feilmarginen kan være på flere meter. Usikkerheten kan være særlig dårlig på veger omgitt av mange høye bygninger (urban canyons). For å bedre nøyaktigheten til GPS, har bilene ofte også INS. Disse interne navigeringssystemene kan kalkulere hvor bilen er, uten eksterne referanser. Men INS har fortsatt en viss feilmargin. Bedre kvalitet på dagens kart og økt kartlegging blant annet ved hjelp av flyfoto kan redusere feilmarginene til GPS og INS ytterligere.
Infrastruktur tilpasset selvkjørende kjøretøy
For at de selvkjørende kjøretøyene skal fungere optimalt trengs oppgraderinger av infrastrukturen. Det betyr for eksempel at alle signalanlegg må ha en innebygd sensor som kan kommunisere med kjøretøyene, se figur 2. Kjøretøyene må også ha tilgang til informasjon om vegen (fartsgrense, kødannelser, vegarbeid, vegmiljø mm). Informasjonen må til enhver tid være oppdatert, slik at bilen vet om fartsgrensen er satt ned pga vegarbeid eller lignende. Dette krever utvikling av nye og oppdateringer av eksisterende databaser.
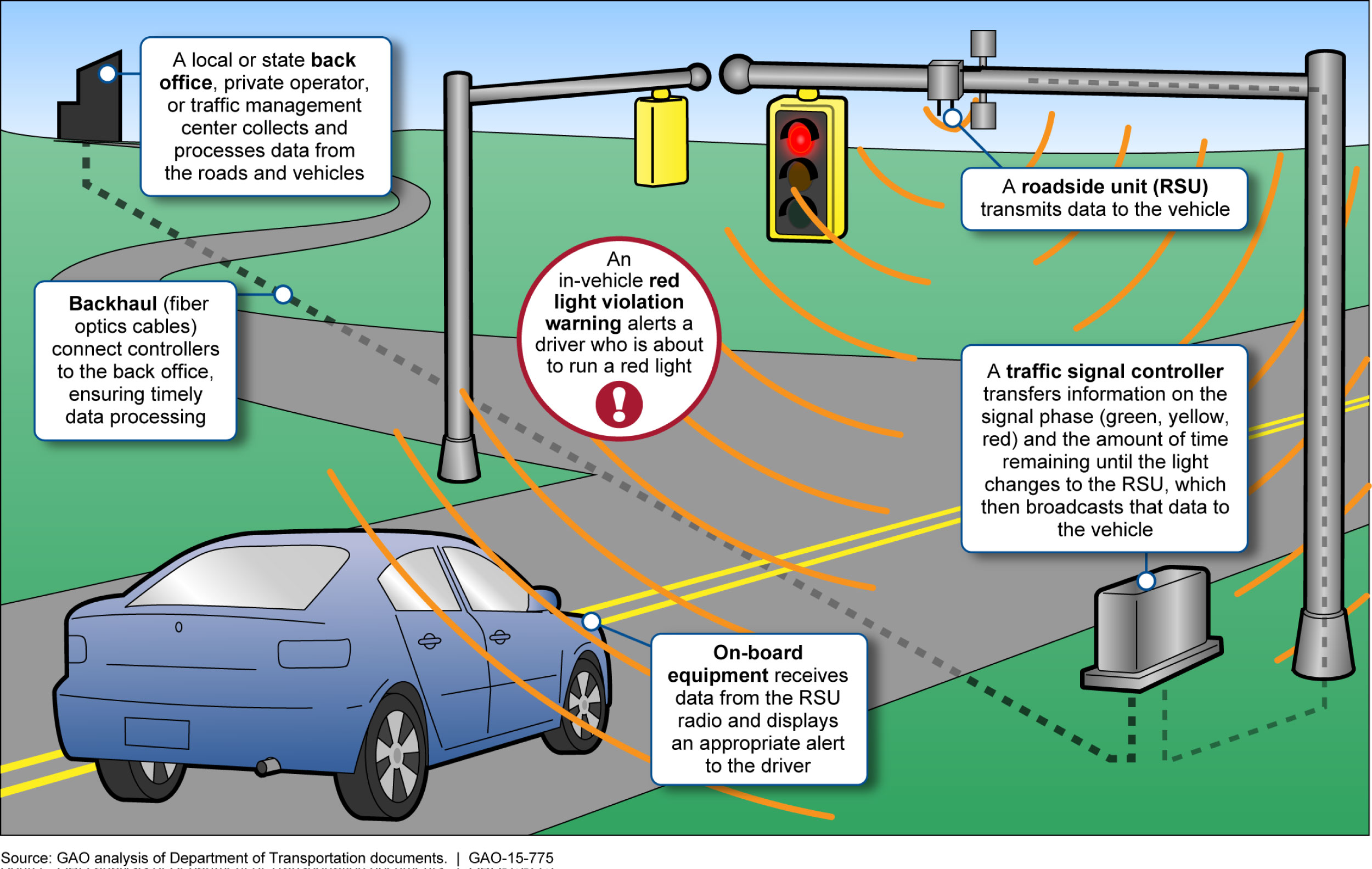
Figur 2: Eksempel på V2I tiltak for mottak av signal fra signalanlegg. Kilde: GAO 2015
Flere av dagens selvkjørende biler er avhengig av godt synlig vegoppmerking for å plassere seg riktig i kjørefeltet. Dette kan stille strengere krav til standard og type oppmerking og være en utfordring i deler av det norske vegnettet som er for smalt til å ha gul midtstripe. Det testes også ut kjøretøy som kan bruke 3D visualisering og bilens sensorer til riktig posisjonering i vegbanen (PSC 2017).
V2V- og V2I kommunikasjon kan for eksempel skje via mobilnettet. Nettforbindelsen må være godt utbygget i alle områder der kjøretøyene skal benyttes.
Det kan være nødvendig med en mulighet for å fjernstyre bilene for å hindre at de sperrer trafikken dersom de kommer opp i en trafikksituasjon de ikke klarer å løse med algoritmene som bilen styres etter.
3. Supplerende tiltak
Selvkjørende biler kan bedre mulighetene for samkjøring og bildelingsordninger. Selvkjørende biler kan redusere behovet for parkeringsplasser, og bidra til større grad av sambruk av parkeringsplasser. Det kan også bidra til at parkeringsarealer i større grad blir plassert utenfor sentrumsområder, på arealer med lav alternativ verdi. Tidligere sentrale parkeringsplasser kan dels omgjøres til på- og avstigningsplasser for de som samkjører eller deler bil eller til byutvikling.
Selvkjørende kjøretøy bør i størst mulig grad være nullutslippskjøretøy, som for eksempel elbiler. Fordelen med en selvkjørende elbil, er at de i utgangspunktet er styrt av elektriske systemer som er enklere å automatisere og når teknologien er på plass kan de kjøre og lade seg opp på egen hånd.
For å forhindre at selvkjørende kjøretøyer fører til økt kjøring, er det mulig å kombinere tiltaket med kilometerbasert vegprising. Tilpasning av infrastrukturen til den nye teknologien vil bli nødvendig.
4. Hvor er tiltaket egnet
Tiltaket vil i første omgang kun være egnet i områder med lave hastigheter, og der myke trafikanter i størst mulig grad er separert fra øvrige trafikanter.
Når teknologien har modnet kan tiltaket bli egnet for hele vegnettet. Sannsynligvis vil tiltaket innføres først for visse type kjøretøy i utvalgte områder. Dette kan for eksempel gjelde på visse bussruter, eller for taxier som kjører innenfor et begrenset område. Kan også gjelde kjøring på terminaler og havneområder.
5. Bruk av tiltaket – eksempler
Forsøk med selvkjørende kjøretøy
Selv om flere bilprodusenter allerede nå kan produsere selvkjørende biler, er det av sikkerhetsmessige og juridiske årsaker langt frem til at disse fritt kan få tilgang til det offentlige vegnettet.
Det pågår for tiden flere tester av kjøretøy med ulik grad av automatisering. Felles for de fleste testene til nå er at de hovedsakelig har vært utført på til dels avlukkede områder (universitetsområder, flyplasser, havner/terminaler, i bussfelt) og ved lave hastigheter ca. 15-20 km/t (EC 2017a). Kjøretøyene må holde lav hastighet, for å sikre at bilen kan stoppe i tidsnok for å unngå kollisjon. Bilens sensorer må kunne oppdage hindringer i tide, tolke informasjonen, og foreta nødvendige handlinger.
De fleste systemene har fortsatt problemer med å tolke enkelte trafikksituasjoner, samt at kveldsmørke/snø/regn/støv kan gjøre bildene fra sensorene uskarpe, og vanskelig å tolke for systemet. Av juridiske årsaker har det i de fleste land også vært påkrevd at det er en person i bilen som kan ta over om systemet skulle svikte. Tabell 4 gir eksempler på noen pågående prosjekter.
Tabell 4: Noen eksempler på prøveprosjekter med selvkjørende kjøretøy.
|
Prosjekt/ |
Type |
Beskrivelse |
|
Norge |
|
|
|
Autobus |
Minibus |
Testing av selvkjørende buss i «virkelig trafikk» i tre norske byer. Ved hjelp av videoovervåkning studeres interaksjonen mellom bussen og øvrige trafikanter. Undersøker også hvordan trafikantene tilpasser seg til de selvkjørende bussene. Stavanger (Forus): 1,2 kilometer rute, selvkjørende buss testet juni-desember 2018. Kongsberg: tre testfaser, den lengste på ca. 4,4 km. Tester startet oktober 2018. Kjøres i tidsrommet 10-14. Oslo: To selvkjørende busser trafikkerer strekningen Akershusstranda-Vippetangen. Testet fra mai 2019, mellom klokken 10-20. Resultater: Bussene kjører så sakte at de kan skape trafikkfarlige situasjoner, for eksempel p.g.a. forbikjøringer. De kjører også defensivt- noe som kan bety mange stopp. Bussene er elektriske, og støyer minimalt, noe som kan medføre at myke trafikanter ikke hører at bussen kommer. Så lenge bussene kjører så sakte har de begrensninger i forhold til nytten for de fleste brukergrupper. I løpet av testene samles det inn mye informasjon som er nyttig i forbindelse med videreutvikling til testing i større skala. Prosjektet ledes av TØI, og er finansiert av Norges forskningsråd, Statens vegvesen, Ruter, Kolumbus og Buskerud fylkeskommune. |
|
Europa |
|
|
|
L3Pilot |
Personbil |
Testing av 100 selvkjørende kjøretøy (nivå 3 og til dels 4) i 11 europeiske land. Skal teste hvordan bilene fungerer i ulike trafikksituasjoner (parkering, forbikjøring, kryss i byer mm). Ser også på aksept, reiseatferd, betydning for trafikk og samfunn. Prosjektet pågår frem til høsten 2020.
|
|
Drive me |
Personbil |
Rundt 100 selvkjørende biler fra Volvo skal testes ut i virkelig trafikk på en spesifikk rute nær Gøteborg. Bilene skal kjøres av privat personer, for å innhente erfaringer fra vanlige folk med de ulike systemene. Teststart i årsskifte 2017/2018. I 2017 ble en bil testet ut av en Gøteborgfamilie.
|
|
Citymobil2 |
Minibuss |
3 storskala forsøk og 4 småskalaforsøk. Storskalaforsøk med minibuss i: Lausanne, Sveits: Testet inne på et universitetsområde, 6 holdeplasser
|
|
Driven |
Personbil |
Skal teste nivå 4 personbiler på M40 mellom London og Oxford. Planen er å ha den første bilen på vegen i løpet av 2019. Prosjektet Meridian fikk i sep. 2017 £100 mill. for å omgjøre deler av M40 (Coventry-London) til en teststrekning for selvkjørende kjøretøy.
|
|
AutoFreight |
Lastebil |
Planen er å teste ut selvkjørende lastebiler fra Volvo på en testbane. Det skal også vurderes hvilke endringer i infrastrukturen på RV40 som er nødvendig for at den i fremtiden kan benyttes av selvkjørende kjøretøy. Prosjektet pågår frem til våren 2020.
|
|
USA |
|
|
|
Waymo |
Personbil |
Waymo-bilene, nivå 4 (tidligere Google) har til nå kjørt rundt 5 mill km på offentlige veger i USA. Har vanligvis to personer i bilen, en testfører som har mulighet til å gripe inn hvis nødvendig, og en systemansvarlig som overvåker algoritmene og registrerer spesielle trafikksituasjoner. Det er nå mulig for privatpersoner å teste bilene (i California, Texas, Arizona og Washington).
|
|
Smartcities |
Infrastruktur |
Byen har fått bevilget $140 mill. for utbygging av CAV tilpasset infrastruktur i en korridor (del av US 33). Deler av bevilgningen skal dekke V2V kommunikasjon i busser, taxier og personbiler mm.
|
|
Mcity |
Flere |
Testområde for selvkjørende kjøretøy på Universitetet i Michigans arealer. Har laget en mini-by for testing av kjøretøy.
|
Link til flere CAV-prosjekter i Europa.
Nederland har flere pilotprosjekter i gang, og myndighetene arbeider med å endre lovverket, for å tillate testing av selvkjørende biler på offentlige veger. Bilene skal få tillatelse til å kjøre uten at det er en fører om bord som kan gripe inn ved eventuelle feil (Regjeringen i Nederland 2017). Selv om det ikke er krav om testfører i bilen, skal bilen kunne fjernstyres, og det forutsettes at en person må sitte i et kontrollrom for å overvåke bilen.
Forventet utvikling
Nivå 3 kjøretøy (full automatisering, men der føreren kan gripe inn hvis trafikksituasjonen krever det, jf. tabell 2) kan bli tilgjengelig på markedet rundt 2020-2025. Nivå 4 og 5 kan bli tilgjengelige fra rundt 2030 (EC 2017b, ERTRAC 2017). Men selv om selvkjørende biler snart kan bli tilgjengelig på markedet, forventes det at det vil ta lang tid før kjøretøyparken kan bli 100% selvkjørende, se figur 3. Dette skyldes blant annet at dagens kjøretøy har lang levetid, mange ønsker fortsatt å føre egen bil, samt behov for endringer i infrastruktur, juridiske og lovmessige forhold. Selvkjørende kjøretøy blir sannsynligvis først aktuelt for flåter av busser og taxier i utvalgte områder av en by.
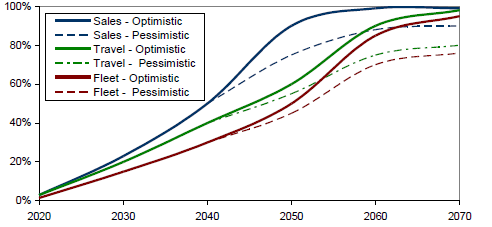
Figur 3: Eksempel på scenarioer for markedsandeler for selvkjørende kjøretøy frem mot 2070. Kilde: Litman 2017.
6. Miljø- og klimavirkninger
Innføring av selvkjørende kjøretøy betyr at flere grupper av befolkningen kan bli mer mobile. En beregning fra USA (Harper m. fl 2016) indikerte at det kan medføre en øning på 14% i årlige kjøretøykilometer med personbil om eldre og personer med funksjonsnedsettelser begynner å benytte selvkjørende biler. Om en inkluderer barn og ungdom vil denne andelen kunne øke ytterligere.
Når en viss andel av kjøretøyene er selvkjørende vil V2V kommunikasjon kunne gi bedre kapasitetsutnyttelse av vegen, og bedre flyt (mindre krappe akselerasjoner og nedbremsinger). Øko-navigasjonssystemer, flåte og trafikkstyringsverktøy for tunge kjøretøy kan redusere CO2 forbruket i størrelsesordenen 4-25% (ECoMove 2013), avhengig av trafikkmengde og infrastruktur. Senario-modelleringer utført i USA (Fagnant og Kockelman 2013) indikerer at opp mot 10 personbiler kan erstattes av en selvkjørende bil, ved optimalisert samkjøring, men det betyr ikke at det blir 90% færre biler på veien.
Andre simuleringer (Zhang m. fl 2015) predikerer at behovet for parkeringsplasser i sentrum kan reduseres med opp mot 90% med en optimal samkjøring utført av selvkjørende kjøretøy.
Tabell 5: Argumenter som kan tale for og imot positive miljøvirkninger av selvkjørende kjøretøy. Kilder: EC 2017a, Wadud m. fl. 2016, Anderson m. fl. 2016, PSC m. fl. 2017, Litman 2017, Alexander-Kearns m. fl 2016.
|
|
Reduksjon |
Økning |
|
Kjørte kilometer |
|
|
|
Køkjøring |
|
|
|
Drivstofforbruk* |
|
|
|
Arealbruk |
|
|
* Mindre betydning om selvkjørende kjøretøy drives elektrisk/med brenselscelle.
Cowi (Berge 2019) har vurdert ulike scenarier for utvikling av selvkjørende kjøretøy på vegnettet i Osloområdet. Avhengig av i hvilken grad selvkjørende kjøretøy bidrar til økt samkjøring og i hvilken grad eksisterende reisende med kollektive transportmidler fortsetter å reise med buss/bane/tog kan dette i beste fall føre til reduksjon av trafikken med 14 prosent. (Resultatet kan bli noe beder om en tillater lengre omveger for å plukke opp flere passasjerer enn det som var lagt inn i eksisterende analyse). Ved det verst tenkelige scenariet (der de selvkjørende kjøretøyene blir så attraktive at dagens kollektivreisende foretrekker dem) kan trafikkmengden fordobles.
Wadud m. fl. (2016) har forsøkt å estimere virkninger av selvkjørende kjøretøy på energiforbruket, se figur 4. Økt reiseomfang som følge av at kjøring oppfattes som mindre belastende (tidskostnadene blir lavere) kan potensielt få stor betydning i negativ retning for miljøvirkningen av tiltaket. Å kombinere tiltaket med kilometerbasert vegprising kan derfor bli nødvendig for å oppnå positive virkninger på miljøet.
Andre faktorer som kan virke negativt (Wadud m. fl 2016) er økt fart (når sikkerheten bedres - kan det være fristende å øke fartsgrensene og farten generelt), nye brukergrupper og økt etterspørsel etter nye elementer i bilen (romsligere biler, større og bedre seter, tv-skjermer mm). I positiv retning kan mekanismer som: mindre behov for store biler med kraftig motorstyrke, økokjøring, «platooning», samkjøring, bildeleordninger, kan klare seg med smalere kjørefelt, samt redusert antall ulykker spille inn. Mekanismen «vehicle right-sizing» (tilpasse bilens størrelse etter antall passasjerer) kan til dels motvirkes av et ønske om større biler som kan virke som kontorer (Litman 2017).
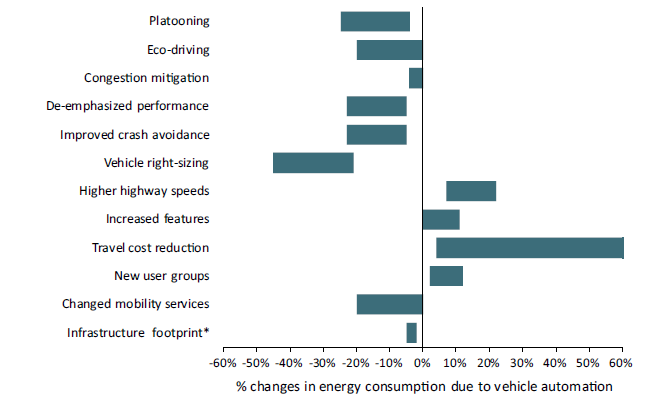
Figur 4: Estimerte endringer i energibruk ved ulike mekanismer som kan oppstå ved overgang til selvkjørende kjøretøy. Kilde: Wadud m. fl. 2016. (Søylene indikerer anslått usikkerhetsintervall).
En undersøkelse basert på amerikanske forhold (Brown m. fl. 2014) anslår at om en summerer alle mekanismer som kan virke i negativ retning, kan energibruken øke med mer enn 150% i forhold til dagens nivå (2013/14 i USA). Om en kun ser på mekanismer som virker i positiv retning, kan dette gi en reduksjon på i overkant av 90% i energibruken. Anslagene inneholder stor usikkerhet. Forfatterne (Brown m. fl. 2014) anslår allikevel at tiltaket kan komme ut i pluss om alle selvkjørende kjøretøy i motsetning til dagens kjøretøy blir elektriske.
Det er stor usikkerhet knyttet til om selvkjørende kjøretøy vil ha en positiv virkning på miljøet eller ikke. De fleste forskere tror at antallet kjørte kilometer vil øke gitt at en ikke innfører restriksjoner, mens det er mer delte meninger om hvordan selvkjørende kjøretøy vil påvirke køkjøring og energiforbruket totalt. Virkningene vil i stor grad påvirkes av implementeringsgraden av selvkjørende kjøretøy på vegene, i hvilken grad befolkningen omfavner delemobilitet og om kjøretøyene blir så attraktive at de som i dag reiser kollektivt foretrekker selvkjørende biler. Om alle selvkjørende kjøretøy blir elektriske eller nullutslippskjøretøy vil dette virke i positiv retning.
I følge en britisk studie (Atkins 2016) må en opp i en andel på minst 50-75% selvkjørende kjøretøy på motorveger, før bedringer i trafikkflyten kan forventes.
7. Andre virkninger
Selvkjørende kjøretøy vil kunne forhindre trafikkulykker som skyldes fører-feil, som er årsaken til en stor andel av ulykkene.
Teknologien til selvkjørende biler er per i dag ikke sikker nok til å ferdes i trafikken uten en fører som kan gripe inn. Dette kan illustreres med den selvkjørende minibussen i Las Vegas, som kolliderte to timer etter at uttestingen på offentlig veg startet (Aftenposten 2017).
Selv når teknologien er bedret, vil systemfeil fortsatt kunne forekomme, og feil vil kunne begås av de som skal oppgradere systemene. I tillegg til dette kan en ny trussel bli cyberkriminalitet (hacking av systemer). Før en høy andel av kjøretøyene på vegene er selvkjørende, kan antallet ulykker øke. Om bilister vet at et møtende kjøretøy er selvkjørende, og er programmert til å stoppe for hindringer, kan de muligens ta større sjanser enn hva de ellers ville gjort. Det er også mulig at personer som sitter i selvkjørende biler føler seg tryggere enn i vanlige biler, og velger å ikke bruke sikkerhetsbelte. Når en høy grad av kjøretøyene er selvkjørende, vil dette muligens medføre økte fartsgrenser på vegene, noe som kan få alvorlige utfall ved en ulykke.
Selvkjørende biler kan føre til bedre tilgjengelighet for nye grupper i befolkningen. Eldre og personer med syns- og andre funksjonsnedsettelser vil få et dør-til-dør tilbud som kan medføre økt sosial kontakt med andre, og at de i mindre grad blir avhengig av andre for å komme seg frem.
Selvkjørende kjøretøy kan føre til reduksjon av arbeidsplasser for yrkesførere, men økt behov for it-kompetanse.
8. Kostnader for tiltaket
Selvkjørende biler antas å kunne bli $25 -50 000 (dvs. ca. 200-400 000 kroner) dyrere enn vanlige biler i starten, forskjellen vil kunne reduseres til rundt $10 000 (ca. 80 000 kroner) etter i overkant av 10 år på markedet i henhold til estimater fra Fagnant og Kockelman (2015). Prisforskjellen skyldes i stor grad dyre it-systemer, utviklingskostnadene og dagens pris på sensorene. Forskjellen i pris vil til en viss grad kunne reduseres på grunn av reduserte forsikringspremier, mindre parkeringskostnader og redusert drivstofforbruk (Fagnant and Kockelman 2015).
I og med at selvkjørende taxier, busser, lastebiler ikke trenger en fører, kan disse bli billigere i drift enn tilsvarende kjøretøy i dag (Litman 2017).
I tillegg kommer kostnader knyttet til ny infrastruktur (fysisk og digital).
I en litteraturstudie fra TØI er noen flere kostnadsbetraktninger referert til.
9. Formelt ansvar
Før selvkjørende kjøretøy fritt får tilgang til det offentlige vegnettet, kreves endringer i lovverket. Muligens vil det også bli behov for endringer i vegnormalene og i trafikkreglene.
Flere juridiske spørsmål må også avklares med hensyn til hvem som står ansvarlig ved en eventuell ulykke.
Regjeringen ønsker å tilrettelegge for testing av selvkjørende kjøretøy også i Norge, og arbeider med endringer i lovverket for å muliggjøre dette (Samferdselsdepartementet 2016, 2017).
Regjeringen ønsker å tilrettelegge for testing av selvkjørende kjøretøy i Norge, og har arbeidet med endringer i lovverket for å muliggjøre dette (Samferdselsdepartementet 2016, 2017). I januar 2018 ble en ny lov for testing av selvkjørende kjøretøy på offentlige veger iverksatt (Lovdata 2018).
10. Utfordringer og muligheter
Selvkjørende kjøretøyer kan bedre sikkerheten og kapasiteten på vegnettet, de kan også øke mobiliteten til grupper som i dag har begrenset mobilitet. På den andre side kan dette føre til økt kjøring, og at folk som tidligere gikk, syklet, eller reiste kollektivt i større grad velger bil. Det kan derfor bli behov for å utvikle hensiktsmessige restriksjoner slik at trafikkmengden ikke øker ytterligere (Nenseth m fl 2019, Berge 2019).
Før selvkjørende kjøretøy blir fritt tilgjengelig på markedet, er det flere utfordringer som må håndteres. Teknologien må blant annet fungere selv i høye hastigheter, på snødekte veger eller veger uten vegoppmerking. Nettilgangen og kartgrunnlaget må ha full dekning overalt der kjøretøyene skal ferdes.
Noen av utfordringene som må håndteres før selvkjørende kjøretøy eventuelt kan innføres i større målestokk er (EC 2017a, ERTRAC 2017):
- Billigere og bedre sensorer.
- Bedre håndtering av situasjoner med blandet trafikk.
- Utvikle et felles europeisk rammeverk og lovverk, og nasjonale lovverk.
- Definere minstekrav som selvkjørende kjøretøy (og systemer) må tilfredsstille.
- Harmonisering og standardisering. For å muliggjøre V2V og V2I kommunikasjon mellom kjøretøy fra ulike bilprodusenter og problemfri kjøring over landegrenser.
- Innføre nødvendige endringer av infrastruktur/trafikkregler/trafikkstyring.
- AI teknologi som takler de moralske dilemmaene som kan oppstå i blandet trafikk (f. eks. hva skal gjøres i situasjoner der en må velge mellom to onder).
- Håndtering av store datamengder/datasikkerhet/personvern.
- Hvem er juridisk ansvarlig ved en ulykke.
På sikt vil det være teknisk mulig å innføre en tilnærmet 100% andel selvkjørende kjøretøy, men mange personer liker å kjøre bil, og det vil sitte langt inne for mange om de ikke lenger får mulighet til selv å styre bilen. Det er også vanskelig å tenke seg at motorsykler blir selvkjørende.
Kollektiv transport er egnet til å transportere store antall passasjerer fra punkt til punkt. En sømløs integrering av selvkjørende biler inn mot kollektivtransport kombinert med smart prising av de ulike transporttilbudene kan redusere sannsynligheten for at en innføring av selvkjørende biler øker mengden kjørte kilometer på veiene.
Figur 5: Utfordringer knyttet til implementering av selvkjørende kjøretøy. ERTRAC 2017.
11. Referanser
Aftenposten 2017
Førerløs buss krasjet etter to timer i drift. Aftenposten, 9. november.
Alexander-Kearns, M., Peterson, M., and Cassady, A. 2016
The impact of vehicle automation on carbon emissions. Where the uncertainty lies. Center for American Progress, Energy and environment. November 2016.
Andersen, U. 2017
Kunstig intelligens i selvkjørende biler. Ny testmetode viser hva som får kunstig intelligens til å ta feil. TU, november 2017.
Anderson, J. M., Kalra, N., Stanley, K. D., Sorensen, P., Samaras, C. and Oluwatola, O. A. 2016
Autonomous vehicle technology. A guide for policymakers. Santa Monica, California, Rand Corporation.
Atkins Ltd. 2016
Research on the impacts of connected and autonomous vehicles (CAVs) on traffic flow. Summary report. For UK Department for Transport. May 2016.
Berge, Ø. 2019
The Oslo city study. How autonomous cars may change transport in cities. COWI report, April 2019.
Brown, A., Gonder, J. and Repac, B. 2014
An analysis of possible energy impacts of automated vehicle. In: Meyer, G. and Beiker, S. (eds.). 2014, Road vehicle automation. Springer international publishing Switzerland. Pp. 137-153.
ECoMove 2013
European project eCoMove solutions can reduce fuel consumptions and CO2 emissions. Press release November 2013.
European Commission (EC)
- 2017a: Connected and automated transport. Studies and reports. Brussels, Directorate-General for Research and Innovation. Unit H.2 Surface transport.
- 2017b: Towards clean, competitive and connected mobility: the contribution of transport research and innovation to the mobility package. Commission staff working document. Brussels, European Commission. Final version, May 2017.
ERTRAC 2017
Automated driving roadmap. ERTRAC working group "Connectivity and automated driving". May 2017.
Fagnant, D. J. and Kockelman, K. M.
- 2013: The travel and environmental impact of shares autonomous vehicle, using agent-based model scenarios. Transportation Research Part C, vol. 40, pp. 1-13.
- 2015: Preparing for autonomous vehicles: opportunities, barriers and policy recommendations. Transportation Research Part A, vol. 77, pp. 167-181.
Foss, T. 2017
Automatisert kjøring på veg. Konsept, terminologi og klassifisering av automatiseringsnivå. Trondheim, Sintef Teknologi og samfunn. Sintef rapport 2017:00264.
Gandhi, T. and Trivedi, M. M. 2007
Pedestrian protection systems: issues, survey and challenges. IEE Transactions on intelligent transportation systems, vol. 8 (3), pp. 413-430.
Government Accountability Office (GAO) 2015
Vehicle-to-infrastructure technologies expected to offer benefits, but deployment challenges exist. Intelligent Transportation Systems. GAO-15-775. Report to Congressional Requesters, September 2015.
Harper, C. D., Hendrickson, C. T., Mangones, S. and Samaras, C. 2016
Estimating potential increase in travel with autonomous vehicle for the non-driving, elderly, and people with travel-restrictive medical conditions. Transportation Research Part C, vol. 72, pp. 1-9.
Litman, T. 2017
Autonomous vehicle implementation predictions. Implication for transport planning. Victoria Transport Policy Institute.
Lovdata 2018
Lov om utprøving av selvkjørende kjøretøy. LOV-2017-12-15-112.
Nenseth, V., Ciccone, A. and Bruus Kristensen, N. 2019
Societal consequences of automated vehicles. Norwegian scenarios. Oslo, Institute of transport economics. TOI report 1700/2019.
Nevada State 2011
Assembly Bill No. 511 - Committee of Transport. AB511.
Public sector consultants (PSC) and Center for automotive research (CAR) 2017
Planning for connected and automated vehicles. Ann Arbor, Michigan. March 2017.
Regjeringen i Nederland 2017
Driverless cars on the roads. News release, 24. February 2017.
SAE International 2016
Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles. Automated driving. Surface vehicle recommended practice. J3016, September 2016.
Samferdselsdepartementet
- 2016: Høring av forslag til lov om utprøving selvkjørende kjøretøy på veg. Desember 2016.
- 2017: Nasjonal transportplan (2018-2029). Meld. St. nr. 33 (2016-2017).
The Guardian 2017
Volvo admits its self-driving cars are confused by kangaroos. 1. July, 2017.
Wadud, Z., MacKenzie, D. and Leiby, P. 2016
Help or hindrance? The travel, energy and carbon impact of highly automated vehicles. Transportation Research Part A, vol. 86, pp. 1-18.
Waymo 2017
On the road to fully self-driving. Waymo safety report.
Zhang, W., Guhathakurta, S., Fang, J. and Zhang, G. 2015
Exploring the impact of shared autonomous vehicles on urban parking demand: An agent-based simulation approach. Sustainable Cities and Society, vol. 19, pp. 34-45.